Welcome

The Sensors research group is part of the Institute of Neuroinformatics in Zurich, a joint institute of the University of Zurich and ETH Zurich.
The Sensors Group is co-directed by Profs. Shih-Chii Liu and Tobi Delbruck.
Research currently focuses on
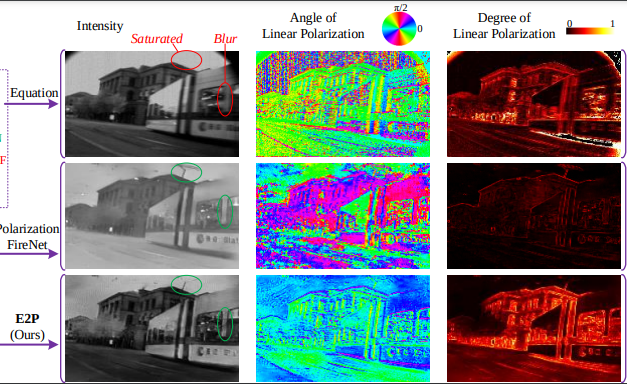
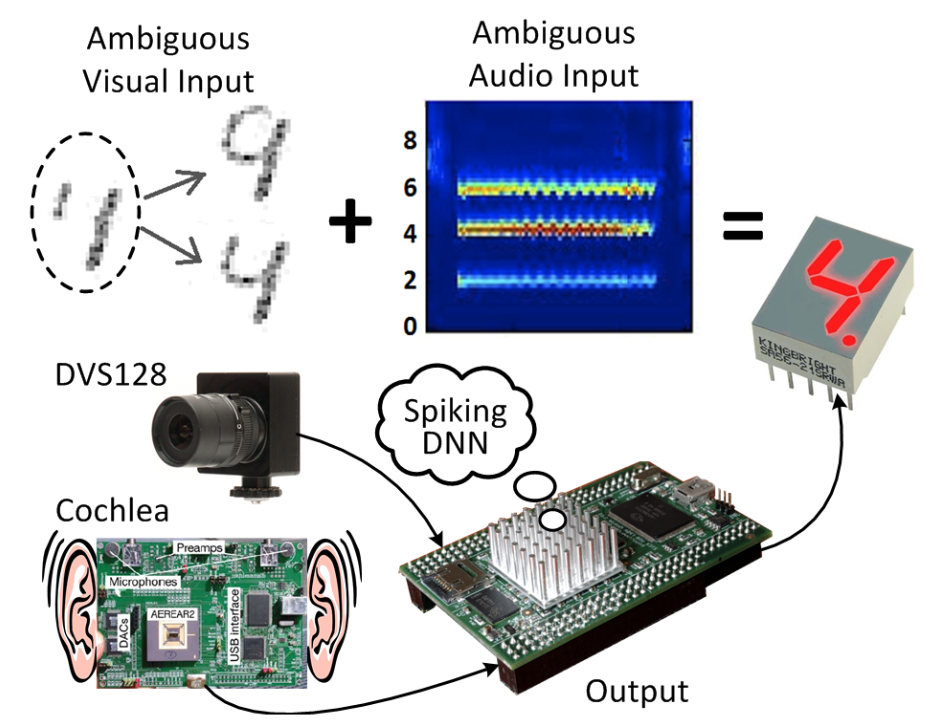
- event-based spiking dynamic vision sensor silicon retinas (see basic US Patent 77286269)
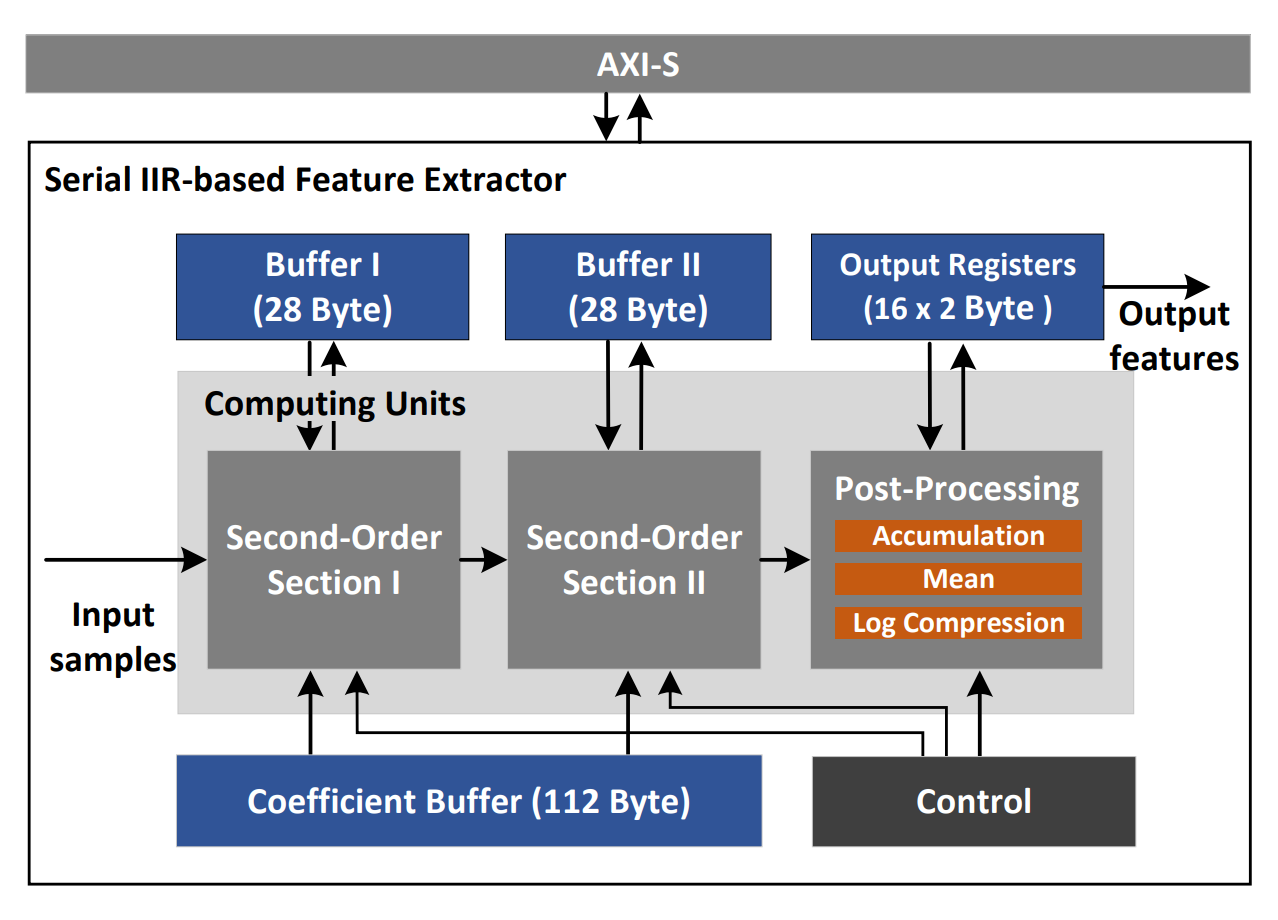
- event-based silicon cochlea audio sensors and audio TinyML designs
- event-driven and data-driven sensor processing algorithms
- conversion methods from Analog Neural Networks to Spiking Neural Networks
- quantization methods suitable for hardware DNN accelerators
- deep neural network deep learning theory and models
- digital implementations of deep neural network inference
- embedded hardware for audio and visual edge devices
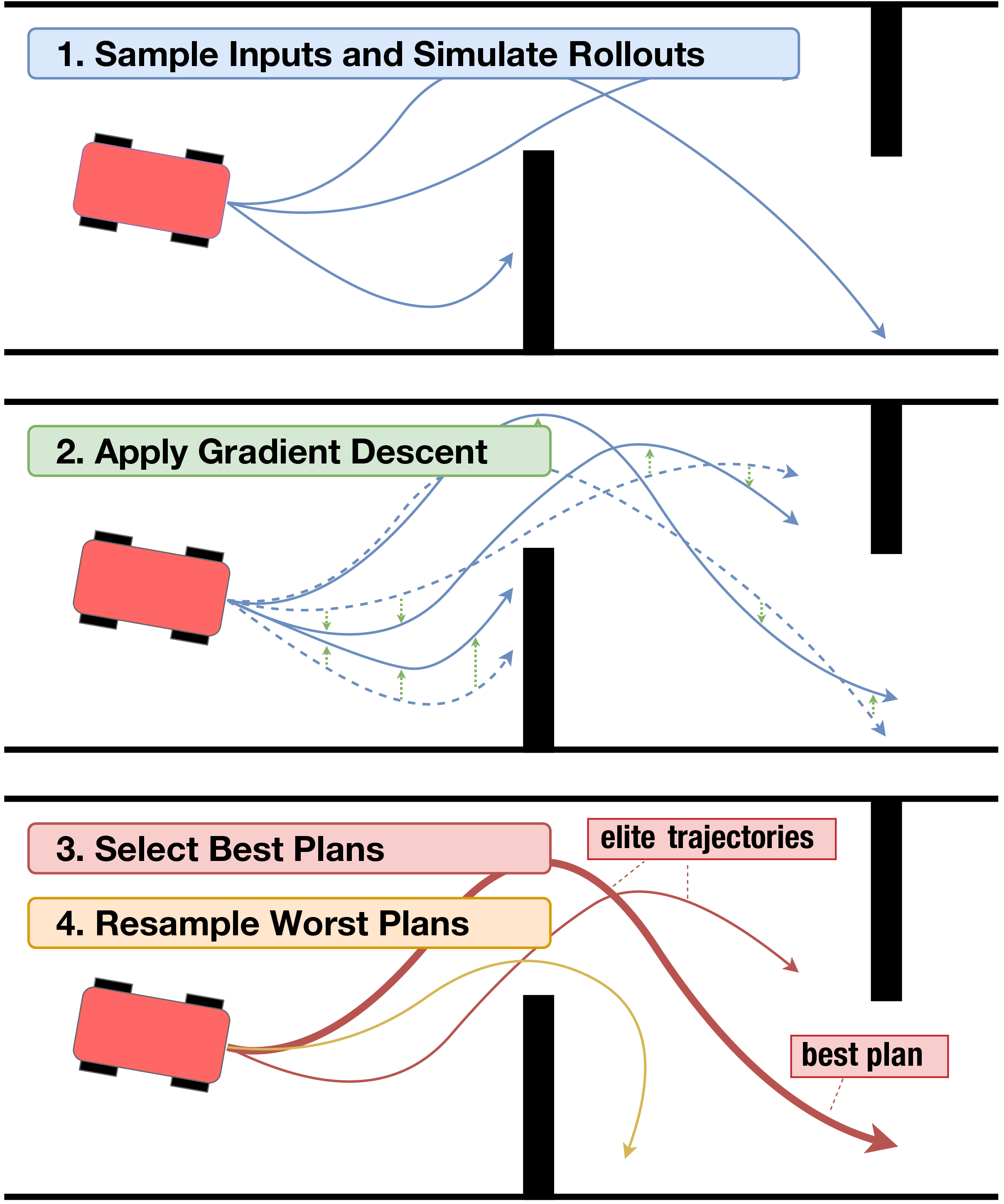
- learning to control and hardware inference of dynamical models for MPC
- demonstrations of these technologies embodied in robots
See